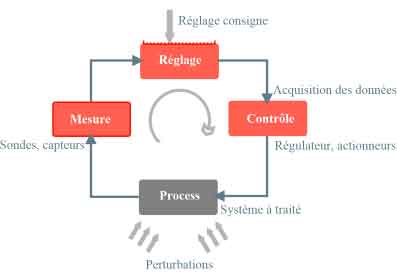
La boucle de régulation fermée :
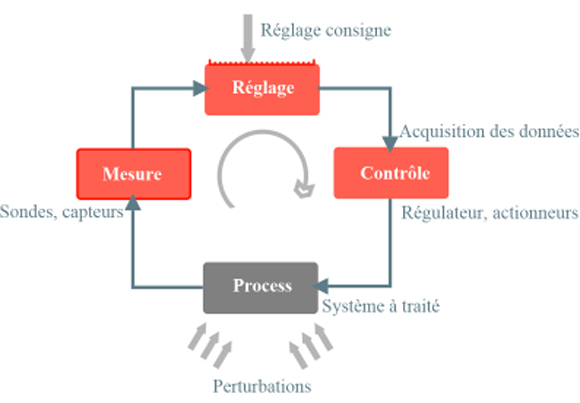
La régulation mesure en permanence, par le biais d’un capteur, la grandeur à régler puis transmet cette information au régulateur. Celui-ci compare cette valeur à la consigne pour en déduire l’erreur, puis suivant son algorithme, transmet son ordre à l’actionneur afin de réduire l’écart provoqué par les perturbations.
La Régulation PID :
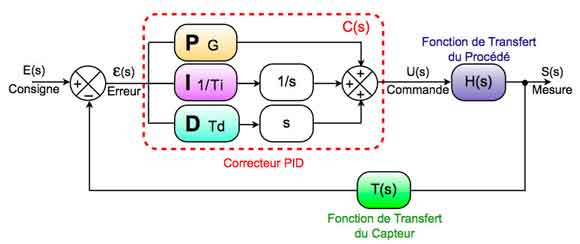
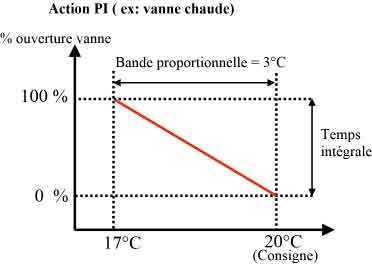
La composante proportionnelle :
L’action proportionnelle applique une correction instantanée pour tout écart entre la mesure et la consigne, plus la perturbation est grande, plus la correction apportée est grande.
La bande proportionnelle c’est l’écart entre la valeur mesurée et la valeur de la consigne notons que si la bande proportionnelle est égale à zéro la régulation fonctionne en tout ou rien.
La composante intégrale :
Cette composante apporte une notion de temps d’intégration à la correction, cette notion de temps s’exprime généralement en seconde.
Cette action est complémentaire à l’action proportionnelle, elle permet de stabiliser dans le temps l’action proportionnelle, plus l’erreur mesurée est constante plus la correction est constante.
L’algorithme de la régulation utilisera une mémoire des différents écarts déjà mesurés pour affiner le temps d’intégrale à appliquer à la correction.
La composante dérivée :
Cette action permet d’anticiper la réponse de la régulation en cas de perturbation rapide ou de modification de consigne ce qui améliore la stabilité du système.
On peut donc dire que cette composante permet de compenser tout dépassement excessif de la consigne.
Pour mieux comprendre faisons une analogie avec un système qui vous est très familier :
Je souhaite circuler avec ma voiture à une vitesse constante de 80 km/h.
Je réagis (comparateur – régulateur) à la différence (erreur) que je constate entre ce que m’indique le compteur (capteur) et ma vitesse (consigne) en appuyant (ordre) sur l’accélérateur (actionneur).
Je suis à l’arrêt, l’écart est maximal donc je mets le pied au plancher. Plus le compteur m’indique que je m’approche des 80km/h, plus je lève le pied : ma réaction est proportionnelle à l’écart.
Quand arrive une montée, je réagis au ralentissement en accélérant plus fort. Mais en appuyant trop fort sur l’accélérateur, je dépasse les 80km/h souhaités. Je lève alors le pied et immanquablement ma vitesse repasse sous la consigne. On imagine que si mon accélération est mal dosée, ma vitesse peut osciller en permanence autour de ma cible sans jamais m’y stabiliser (système instable). Pour éviter ce phénomène, je dois éviter de sur-réagir en limitant un peu mon seuil de détection : au lieu de réagir dès que je vois 1km/h de différence, je décide de tolérer 3km/h d’écart par exemple. Ce seuil de non-réaction me laisse le temps de stabiliser ma vitesse.
Mais si la route monte un peu, la vitesse peut rester stable à 77.5km/h sans que je réagisse puisque je suis dans la tolérance que je me suis permise. Je change la règle : je ne réagis plus à une différence instantanée entre le compteur et la consigne, mais à l’accumulation de différences pendant un laps de temps. Donc 1km/h d’écart pendant quelques secondes sera toléré sans réaction, mais si ça se prolonge je réagis. En conclusion : la tolérance me permet d’éviter de sur-réagir en permanence et d’éviter qu’une petite différence s’installe sans que je m’en aperçoive. Ma vitesse oscille encore un peu quand je dois la corriger et faire face aux perturbations extérieures, mais je suis sûr maintenant de toujours atteindre précisément ma consigne au bout d’un certain temps. C’est la composante intégrale de ma réaction.
Mais je peux encore améliorer ma réaction en mémorisant avec quelle rapidité ma vitesse s’écarte de la consigne que je me suis fixée. En effet, dans une très légère montée, il est inutile d’appuyer très fort sur l’accélérateur, en revanche, lorsque j’attaque un col très raide, il vaut mieux que j’anticipe et appuie très fort sur la pédale afin de me rapprocher au plus vite de ma vitesse souhaitée. C’est la partie dérivée de ma réaction.


